Über LightSail wurde Geektimes bereits kommentiert. DieserSatellit geektimes.ru/post/250712 wurde letzte Woche erfolgreich gestartet. Die Telemetrie wurde zwei Tage lang erfolgreich durchgeführt, alle Systeme funktionierten einwandfrei, der Einsatz des Segels war im Juni nach 28 Flugtagen geplant, aber am Freitag „verschwand“ der Satellit. Die Ingenieure verbrachten ein großartiges Wochenende damit, herauszufinden, was passiert ist.Das Ergebnis ihrer Arbeit war ein Artikel von Software Glitch Pausen LightSail Test Mission, in dem die Ereignisse beschrieben wurden, die zum Ausfall geführt haben, sowie weitere Schritte, um den Satelliten wieder in den normalen Betrieb zu versetzen .Telemetrie wird mit einer Frequenz von 437,435 MHz übertragen . Die Planetary Society forderte Funkamateure auf, ihnen beim Empfang von Satellitentelemetrie zu helfen. Ken Swaggart (W7KKE) aus Lincoln City, Oregon, war der erste Amateurfunker, der ein vollständiges Telemetriepaket erhielt. Die Veranstaltung fand fünf Stunden nach dem Start statt. Innerhalb von zwei Tagen gingen 140 Datenpakete ein - der Satellit war in gutem Zustand, Leistung und Temperatur waren normal.Der Fehler lag jedoch in der Linux-basierten Satellitensoftware. Alle 15 Sekunden sendete der Satellit ein Beacon-Signal. Gleichzeitig wurden die Daten zur Datei beacon.csv hinzugefügt. Der Moment rückte unaufhaltsam näher, als die Datei den gesamten verfügbaren Speicherplatz von 32 Megabyte einnahm und die Flugsoftware abstürzte. Es stellt sich heraus, dass der Hersteller der Steuerkarte bereits eine Softwareversion mit einem behobenen Fehler hatte, der Satellit jedoch nicht auf die aktuelle Version aktualisiert wurde. Am Freitag erhielt das Managementteam eine Softwarefehlerbenachrichtigung und bereitete sich darauf vor, die Satellitensoftware beim nächsten Passieren im Sichtfeld der Station aus der Ferne zu aktualisieren. Der Satellit schwebte jedoch früher. Die neueste Telemetrie wurde am 22. Mai um 21:31 UTC empfangen. Das Bild zeigt die Position des Satelliten zum Zeitpunkt der letzten Kommunikationssitzung: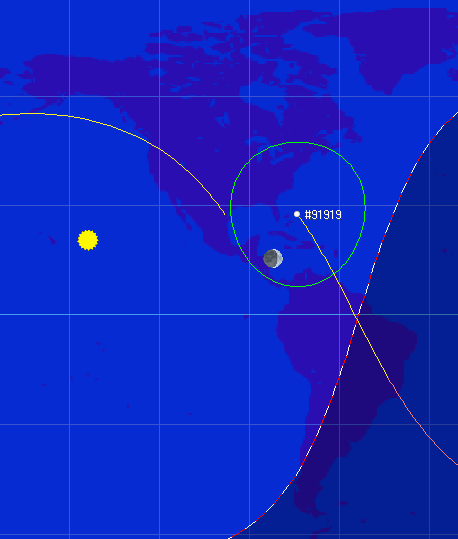
vollständiges TelemetriepaketPacket 440500
Type: Telemetry Beacon
Mission: LS
Software: LS-FSW-v2
Hardware: LightSail Flight Unit A
Posted at: Wed May 20 18:32:41 2015 UTC
Human-readable form:
00: RTC =33315 [s]
01: UserTime =1373 [jiffies]
02: SystemTime =7761 [jiffies]
03: Processes =5966
04: Processes_Running =2
05: Processes_Blocked =0
06: Uplink_RX_Counter =0
07: Atmel_Volt =4.351990 [V]
08: Atmel_Curr =0.051117 [A]
09: DaughtAPwr_Volt =0.007996 [V]
10: DaughtAPwr_Curr =0.000000 [A]
11: DaughtATmp =15.500000 [C]
12: DaughtBPwr_Volt =0.007996 [V]
13: DaughtBPwr_Curr =-0.000900 [A]
14: DaughtBTmp =16.750000 [C]
15: FiveV_PlPwr_Volt =4.915985 [V]
16: FiveV_PlPwr_Curr =0.280914 [A]
17: ThreeV_PlPwr_Volt =3.279999 [V]
18: ThreeV_PlPwr_Curr =0.042725 [A]
19: SP1_Temp =22.500000 [C]
20: SP2_Temp =23.250000 [C]
21: SP3_Temp =24.000000 [C]
22: SP4_Temp =24.250000 [C]
23: SP5_Temp =0.000000 [C]
24: Power0_In =0.000250 [A]
25: Power1_Out =0.000250 [A]
26: Power2_In =0.000250 [A]
27: Power3_Out =0.000250 [A]
28: Power4_In =0.000250 [A]
29: Power5_Out =0.000250 [A]
30: Power6_In =0.000250 [A]
31: Power7_Out =0.000250 [A]
32: Power8 =0.664750 [A]
33: Batt0_Voltage =4.309040 [V]
34: Batt0_Current =79.375003 [mA]
35: Batt1_Voltage =4.313920 [V]
36: Batt1_Current =62.500002 [mA]
37: Batt2_Voltage =4.309040 [V]
38: Batt2_Current =97.656253 [mA]
39: Batt3_Voltage =4.299280 [V]
40: Batt3_Current =109.531254 [mA]
41: Batt4_Voltage =3.747840 [V]
42: Batt4_Current =10.156250 [mA]
43: Batt5_Voltage =4.313920 [V]
44: Batt5_Current =104.218753 [mA]
45: Batt6_Voltage =4.318800 [V]
46: Batt6_Current =106.562503 [mA]
47: Batt7_Voltage =4.313920 [V]
48: Batt7_Current =100.781253 [mA]
49: Gyro_Sens_1 =-7.062500 [deg/s]
50: Gyro_Sens_2 =-0.100000 [deg/s]
51: Gyro_Sens_3 =0.137500 [deg/s]
52: Sun_Sens1_X =150.300003 [deg]
53: Sun_Sens1_Y =131.399994 [deg]
54: Sun_Sens2_X =126.000000 [deg]
55: Sun_Sens2_Y =63.900002 [deg]
56: Sun_Sens3_X =58.500000 [deg]
57: Sun_Sens3_Y =80.099998 [deg]
58: Sun_Sens4_X =80.099998 [deg]
59: Sun_Sens4_Y =150.300003 [deg]
60: Sun_Sens5_X =180.000000 [deg]
61: Sun_Sens5_Y =180.000000 [deg]
62: Mag_Sens1_X =99 [mG]
63: Mag_Sens1_Y =382 [mG]
64: Mag_Sens1_Z =47 [mG]
65: Mag_Sens2_X =190 [mG]
66: Mag_Sens2_Y =149 [mG]
67: Mag_Sens2_Z =189 [mG]
68: Mag_Sens3_X =128 [mG]
69: Mag_Sens3_Y =259 [mG]
70: Mag_Sens3_Z =256 [mG]
71: Mag_Sens4_X =119 [mG]
72: Mag_Sens4_Y =18 [mG]
73: Mag_Sens4_Z =156 [mG]
74: Torque_Curr_X =0 [A]
75: Torque_Curr_Y =0 [A]
76: Torque_Curr_Z =0 [A]
77: Panel_Switch_Status =f
78: Motor_Current_Position =0 [Counts]
79: Camera_0_onOff =0
80: Camera_1_onOff =0
81: Sail_stowedDeployed =0
82: Motor_onOff =0
83: Camera_0_Remaining_Pics=0
84: Camera_1_Remaining_Pics=0
85: Bang_onOff =1
86: Sail_Damping_Executed =0
87: Pib_Met =4.000000 [s]