¡Hola a todos! Hoy decidimos probar varios dispositivos en las plataformas Qualcomm y MTK para comprender si los chicos de MTK complementaron sus capacidades de navegación, porque hace un par de años trabajaron, por decirlo suavemente, no muy bien, pero las soluciones de Qualcomm siempre fueron famosas por sus capacidades. Los héroes de nuestra primera prueba fueron dos teléfonos inteligentes, uno de los cuales se basa en la plataforma Qualcomm Snapdragon 400 , y el segundo en el bastante nuevo MTK MT6735 , que brinda soporte para 3 sistemas de navegación a la vez: GPS, GLONASS y Beidou. Las pruebas se llevaron a cabo en modo peatonal y al viajar en un vehículo. NMEA Tools Pro se utilizó para grabar registros NMEA.
Los héroes de nuestra primera prueba fueron dos teléfonos inteligentes, uno de los cuales se basa en la plataforma Qualcomm Snapdragon 400 , y el segundo en el bastante nuevo MTK MT6735 , que brinda soporte para 3 sistemas de navegación a la vez: GPS, GLONASS y Beidou. Las pruebas se llevaron a cabo en modo peatonal y al viajar en un vehículo. NMEA Tools Pro se utilizó para grabar registros NMEA.Prueba de peatones
Si observa el fragmento del registro NMEA a continuación, puede ver que para calcular las coordenadas, datos de 9 satélites GPS (con los números 07, 28, 30, 05, 20, 13, 19, 09 y 10) y 7 satélites GLONASS ( con los números 77, 67, 76, 78, 86, 68 y 87).$GNRMC,080351.000,A,5546.3288,N,03732.4328,E,1.984,228.75,180515,,,A*42
$GNVTG,228.75,T,,M,1.984,N,3.676,K,A*29
$GNGGA,080352.000,5546.3281,N,03732.4320,E,1,16,0.74,117.8,M,14.5,M,,*7F
$GPGSA,A,3,07,28,30,05,20,13,19,09,10,,,,1.06,0.74,0.76*0C
$GLGSA,A,3,77,67,76,78,86,68,87,,,,,,1.06,0.74,0.76*1B
Las coordenadas se calculan de acuerdo con los datos de ambos sistemas de navegación, como lo demuestra el prefijo GN en las líneas $ GNRMC, $ GNVTG y $ GNGGA.La pista registrada en el modo peatonal se muestra en la figura: en la pista anterior, la precisión de posicionamiento puede considerarse bastante aceptable en el modo peatonal, para una situación en la que el receptor está rodeado de edificios altos, cubierto con hojas de árboles y registrado en tiempo lluvioso.
en la pista anterior, la precisión de posicionamiento puede considerarse bastante aceptable en el modo peatonal, para una situación en la que el receptor está rodeado de edificios altos, cubierto con hojas de árboles y registrado en tiempo lluvioso. En la otra pista a continuación, puede ver el funcionamiento casi perfecto del módulo de navegación del teléfono inteligente en el MTK (pista azul) en comparación con el trabajo del módulo del teléfono inteligente en Qualcomm (pista roja).
En la otra pista a continuación, puede ver el funcionamiento casi perfecto del módulo de navegación del teléfono inteligente en el MTK (pista azul) en comparación con el trabajo del módulo del teléfono inteligente en Qualcomm (pista roja). El Qualcomm Snapdragon 400 SoC MSM8228 también tiene la capacidad de trabajar con los sistemas satelitales GLONASS y GPS. Sin embargo, a juzgar por los registros NMEA de este dispositivo, los datos de los satélites GLONASS no se utilizan para determinar las coordenadas.Al comparar los registros NMEA registrados por los dispositivos durante esta prueba, puede ver que las señales de los mismos satélites son recibidas por dispositivos con diferentes SNR (relación señal / ruido) al mismo tiempo. Las SNR de MTK superan en promedio las SNR de Qualcomm en más de 10 dB.Fragmento del registro NMEA del dispositivo MTK:
El Qualcomm Snapdragon 400 SoC MSM8228 también tiene la capacidad de trabajar con los sistemas satelitales GLONASS y GPS. Sin embargo, a juzgar por los registros NMEA de este dispositivo, los datos de los satélites GLONASS no se utilizan para determinar las coordenadas.Al comparar los registros NMEA registrados por los dispositivos durante esta prueba, puede ver que las señales de los mismos satélites son recibidas por dispositivos con diferentes SNR (relación señal / ruido) al mismo tiempo. Las SNR de MTK superan en promedio las SNR de Qualcomm en más de 10 dB.Fragmento del registro NMEA del dispositivo MTK:$GNGGA,080418.000,5546.3160,N,03732.4086,E,1,17,0.66,111.0,M,14.5,M,,*79
$GPGSA,A,3,07,28,30,05,20,13,19,09,10,15,,,0.95,0.66,0.69*0E
$GLGSA,A,3,77,67,76,78,86,68,87,,,,,,0.95,0.66,0.69*1D
$GPGSV,3,1,12,30,86,107,32.6,07,52,084,31.1,28,45,188,22.1,13,40,297,30.2*7B
$GPGSV,3,2,12,05,37,257,37.9,20,34,266,34.3,19,26,066,18.2,27,18,035,*67
$GPGSV,3,3,12,09,11,138,39.3,10,10,197,34.8,15,09,308,17.0,21,06,337,*6C
$GLGSV,3,1,10,77,81,339,19.3,68,50,303,29.8,67,47,209,24.0,78,32,253,27.0*65
$GLGSV,3,2,10,76,31,060,15.0,86,25,066,19.0,85,18,012,,69,08,338,*6D
Fragmento NMEA del dispositivo Qualcomm:$GPGGA,080418,5546.310615,N,03732.389129,E,2,09,1.5,157.0,M,15.0,M,,*41
$GPGSV,3,1,10,05,35,255,19,07,50,082,19,09,10,136,19,10,08,196,22*70
$GPGSV,3,2,10,13,39,296,14,19,24,064,13,20,32,265,13,28,45,187,15*76
$GPGSV,3,3,10,30,84,106,21*43
$GLGSV,1,1,10,67,46,208,14*58
| | Número de satélite | treinta | 07 | 28 | trece | 05 | 10 | 67 |
| MTK | SNR, dB | 32,6 | 31,1 | 22,1 | 30,2 | 37,9 | 34,8 | 24,0 |
| Qualcomm | SNR, dB | 21 | diecinueve | quince | 14 | diecinueve | 22 | 14 |
* Valores de SNR en negrita para satélites GLONASS.Dado que el entorno de ruido electromagnético externo es el mismo para ambos dispositivos, esto significa que la potencia de la señal en la entrada del dispositivo de navegación MTK es al menos 10 veces mayor. Y esto se aplica tanto a las señales del sistema satelital GPS como al sistema GLONASS. Es difícil decir cuál es exactamente la causa de este fenómeno. Se puede suponer, por ejemplo, que la antena GPS / GLONASS y la ruta de recepción del dispositivo MTK están fabricadas de manera más sólida y tienen mejores características que los módulos de dispositivos Qualcomm similares. Sin embargo, esto es solo una suposición.La próxima prueba de peatones también mostró, en promedio, una operación más precisa y estable del "receptor de navegación" del dispositivo MTK (pista azul) en comparación con el dispositivo Qualcomm (pista roja), aunque la pista en sí ya no se ve tan perfecta como la última vez. Durante esta prueba, como en la anterior, las señales de los mismos satélites fueron recibidas por dispositivos con diferentes SNR al mismo tiempo. Como en el primer caso, el nivel de las señales de satélite en la entrada del dispositivo MTK es casi siempre más alto que en la entrada del dispositivo en Qualcomm. Los datos se presentan en los fragmentos de los registros de NMEA a continuación y se tabulan por conveniencia.Fragmento de registro NMEA de Qualcomm:
Durante esta prueba, como en la anterior, las señales de los mismos satélites fueron recibidas por dispositivos con diferentes SNR al mismo tiempo. Como en el primer caso, el nivel de las señales de satélite en la entrada del dispositivo MTK es casi siempre más alto que en la entrada del dispositivo en Qualcomm. Los datos se presentan en los fragmentos de los registros de NMEA a continuación y se tabulan por conveniencia.Fragmento de registro NMEA de Qualcomm:$GPGSV,3,1,15,05,25,240,11,07,35,090,18,11,01,094,15,13,54,289,22*72
$GPGSV,3,2,15,15,21,306,25,19,24,047,12,20,24,253,11,27,08,022,16*7D
$GPGSV,3,3,15,28,61,182,10,30,68,091,25*78
$GLGSV,2,1,15,81,25,092,12,70,52,272,16,79,63,049,19,87,08,358,16*64
$GLGSV,2,2,15,71,23,331,18*5E
Fragmento del registro NMEA del dispositivo MTK:$GPGSV,3,1,11,30,70,092,35.4,28,62,184,16.5,13,56,290,28.7,07,36,091,27.1*7E
$GPGSV,3,2,11,05,26,241,24.8,20,26,253,18.9,19,25,049,15.9,15,23,307,24.9*73
$GPGSV,3,3,11,27,09,024,29.1,11,03,094,19.9,21,01,325,*40
$GLGSV,3,1,10,79,63,050,29.5,70,52,273,25.5,80,48,267,18.1,88,30,045,27.9*63
$GLGSV,3,2,10,69,27,202,13.7,81,26,093,23.1,71,24,332,28.6,78,16,069,*7A
$GLGSV,3,3,10,87,09,359,13.0,73,01,257,*74
| | Número de satélite | 05 | 07 | once | trece | quince | diecinueve | veinte | 81 | 70 |
| MTK | SNR, dB | 24,8 | 27,1 | 19,9 | 30,2 | 24,9 | 15,9 | 18,9 | 23,1 | 25,5 |
| Qualcomm | SNR, dB | once | Dieciocho | quince | 14 | 25 | 12 | once | 12 | dieciséis |
* Valores de SNR en negrita para satélites GLONASS.También se puede observar que el "receptor de navegación" del teléfono inteligente en el MTK comienza a mostrar la ubicación exacta mucho más rápido (no debe confundirse con el parámetro TTFF - Tiempo para la primera reparación) después de comenzar a grabar el registro (cuando la posición es fija y la velocidad de movimiento relativa a la superficie de la Tierra es cero). En la prueba anterior, tomó 32 segundos, mientras que un teléfono inteligente Qualcomm pasó 59 segundos.Un breve resumen de los resultados de las pruebas de peatones del receptor MTK.El receptor de navegación del dispositivo resuelve el problema utilizando información de ambos sistemas de navegación (GPS y GLONASS), lo que permite seleccionar satélites con los mejores niveles de señal y ubicación en el cielo. En términos generales, el receptor tiene a su disposición el doble de fuentes de información para resolver un problema de navegación. Aparentemente, el receptor tiene una antena GPS / GLONASS de alta calidad y una ruta de alta frecuencia bien diseñada, que proporciona un nivel de señal suficientemente alto para su posterior procesamiento.Las características anteriores permiten al receptor determinar de forma rápida y precisa la ubicación actual, así como un funcionamiento más confiable en condiciones adversas para recibir señales de satélite.Pruebas de vehículos
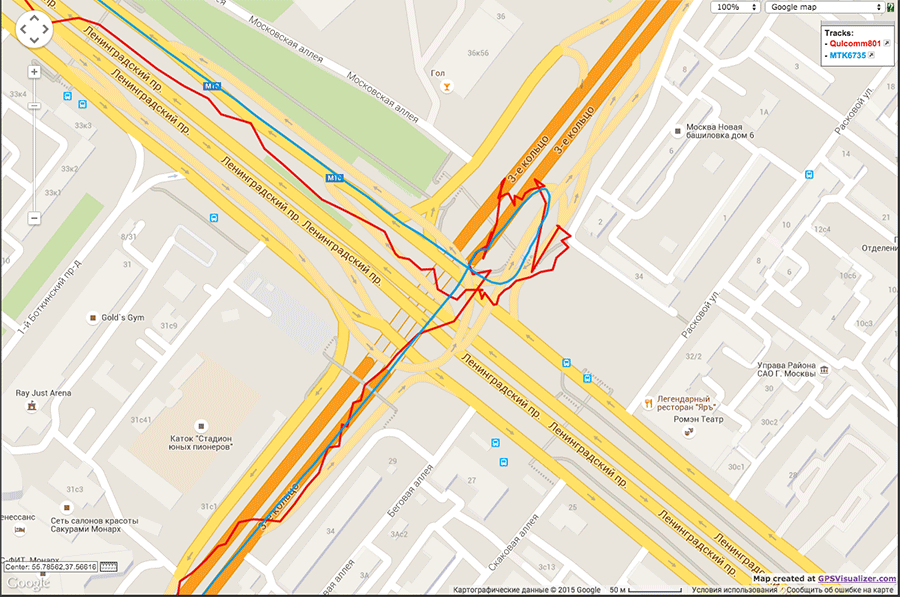
Las pruebas se llevaron a cabo en una motocicleta. Esta vez, el rival del teléfono inteligente en MT6735 era un teléfono inteligente basado en Qualcomm Snapdragon 801 . Mientras grababa los registros de NMEA, los dispositivos estaban en los bolsillos de la chaqueta del conductor.A continuación se presentan fragmentos de pistas de ambos dispositivos. La pista azul es MT6735, la pista roja es Qualcomm. Puede notar de inmediato un MTK de pista mucho más suave y no muy disperso. La pista del dispositivo Qualcomm refleja una dispersión bastante grande al determinar las coordenadas a lo largo de casi toda la ruta. Desde los saltos caóticos de la pista al comienzo de la ruta, puede ver cuánto tiempo tomó este dispositivo para determinar la ubicación correcta. Al mismo tiempo, el dispositivo MTK hizo frente a esta tarea mucho más rápido.A continuación se muestran fragmentos de pistas que muestran con cuánta más precisión funciona el "receptor de navegación" del MTK.
Puede notar de inmediato un MTK de pista mucho más suave y no muy disperso. La pista del dispositivo Qualcomm refleja una dispersión bastante grande al determinar las coordenadas a lo largo de casi toda la ruta. Desde los saltos caóticos de la pista al comienzo de la ruta, puede ver cuánto tiempo tomó este dispositivo para determinar la ubicación correcta. Al mismo tiempo, el dispositivo MTK hizo frente a esta tarea mucho más rápido.A continuación se muestran fragmentos de pistas que muestran con cuánta más precisión funciona el "receptor de navegación" del MTK.
 Es bastante posible (incluso lo más probable) que esto se explique por un algoritmo especial de filtrado de datos en el propio receptor, que consiste en el hecho de que las coordenadas actuales se ajustan teniendo en cuenta la incapacidad de un objeto físico para cambiar instantáneamente la velocidad, la dirección del movimiento y la ubicación.La desventaja de este enfoque es que el promedio y el análisis requieren la acumulación de una cierta cantidad de datos y un cierto tiempo para tomar una decisión. Esto conduce a una notable inercia en la determinación de las coordenadas, que se expresa en la desviación de la pista de la ruta real, cuando la ruta cambia de dirección, y la velocidad de movimiento es bastante alta (curvas cerradas, curvas, cruces de carreteras).Los fragmentos de registros de NMEA que se muestran a continuación muestran aproximadamente los mismos niveles de señal provenientes de los mismos satélites (tanto GPS como GLONASS) al mismo tiempo. Si es así, entonces el funcionamiento más correcto del receptor MTK probablemente esté determinado por un algoritmo más competente para procesar la información de los satélites.Fragmento del registro NMEA del dispositivo MTK:
Es bastante posible (incluso lo más probable) que esto se explique por un algoritmo especial de filtrado de datos en el propio receptor, que consiste en el hecho de que las coordenadas actuales se ajustan teniendo en cuenta la incapacidad de un objeto físico para cambiar instantáneamente la velocidad, la dirección del movimiento y la ubicación.La desventaja de este enfoque es que el promedio y el análisis requieren la acumulación de una cierta cantidad de datos y un cierto tiempo para tomar una decisión. Esto conduce a una notable inercia en la determinación de las coordenadas, que se expresa en la desviación de la pista de la ruta real, cuando la ruta cambia de dirección, y la velocidad de movimiento es bastante alta (curvas cerradas, curvas, cruces de carreteras).Los fragmentos de registros de NMEA que se muestran a continuación muestran aproximadamente los mismos niveles de señal provenientes de los mismos satélites (tanto GPS como GLONASS) al mismo tiempo. Si es así, entonces el funcionamiento más correcto del receptor MTK probablemente esté determinado por un algoritmo más competente para procesar la información de los satélites.Fragmento del registro NMEA del dispositivo MTK:$GNRMC,193331.000,A,5548.6090,N,03730.3074,E,44.714,334.77,190515,,,A*71
$GNVTG,334.77,T,,M,44.714,N,82.854,K,A*26
$GNGGA,193332.000,5548.6194,N,03730.2986,E,1,20,0.59,156.6,M,14.6,M,,*76
$GPGSA,A,3,16,07,21,15,13,18,27,26,22,19,20,29,1.12,0.59,0.96*0F
$GLGSA,A,3,78,69,85,86,71,77,87,70,,,,,1.12,0.59,0.96*12
$GPGSV,4,1,14,21,72,092,28.3,18,51,175,24.0,16,46,264,34.7,27,38,298,32.7*7B
$GPGSV,4,2,14,26,35,226,24.7,15,26,090,28.0,22,21,201,17.3,13,21,053,30.7*7A
$GPGSV,4,3,14,29,15,130,23.5,07,10,338,26.2,20,09,046,29.0,19,08,301,15.4*7A
$GPGSV,4,4,14,30,04,006,26.6,05,03,041,*62
$GLGSV,3,1,10,86,82,017,26.7,70,54,064,26.8,71,46,156,24.4,85,35,109,26.9*65
$GLGSV,3,2,10,87,29,300,18.8,77,25,294,17.3,78,18,350,20.0,69,10,024,18.3*6E
$GLGSV,3,3,10,76,05,245,,72,04,186,*6D
Fragmento de registro NMEA de Qualcomm:$GPGGA,193332.8,5548.632178,N,03730.280528,E,1,12,0.6,175.7,M,15.0,M,,*5F
$GPVTG,334.6,T,334.6,M,42.6,N,78.8,K,A*24
$GPRMC,193332.8,A,5548.632178,N,03730.280528,E,42.6,334.6,190515,0.0,E,A*38
$GPGSA,A,3,07,13,15,16,18,20,21,22,26,27,29,30,1.2,0.6,1.0*31
$GNGSA,A,3,07,13,15,16,18,20,21,22,26,27,29,30,1.2,0.6,1.0*2F
$GNGSA,A,3,78,70,86,77,69,87,85,71,,,,,1.2,0.6,1.0*25
$GPGSV,4,1,15,07,08,336,32,08,,,22,13,20,052,27,15,24,088,17*4E
$GPGSV,4,2,15,16,45,262,27,18,50,174,27,20,08,046,22,21,71,091,22*70
$GPGSV,4,3,15,22,20,199,15,26,34,224,25,27,36,296,30,29,13,129,18*79
$GPGSV,4,4,15,30,03,004,22,05,01,039,,19,07,299,*4A
$GLGSV,3,1,10,78,18,348,27,70,53,063,25,86,81,018,25,77,24,293,21*6D
$GLGSV,3,2,10,69,09,023,17,87,28,299,27,85,33,108,15,71,46,154,24*64
$GLGSV,3,3,10,76,04,244,,72,03,185,*69
Puede observarse nuevamente que, aunque el receptor del dispositivo en el SoC Qualcomm Snapdragon 801 procesa información proveniente de satélites GLONASS, en las oraciones principales del registro NMEA ($ GPGGA, $ GPRMC, $ GPVTG) proporciona información construida sobre el procesamiento de señales del sistema GPS solamente .El dispositivo MTK proporciona valores basados en un cálculo de los datos provenientes de ambos sistemas de navegación. Es definitivamente difícil decir si esto es una ventaja o no.Una breve conclusión.En general, el funcionamiento del "receptor de navegación" del dispositivo basado en MTK MT6735 dejó una impresión positiva. El receptor determina de forma rápida y precisa las coordenadas actuales. La extensión de los valores de coordenadas durante la navegación es pequeña. El receptor cumple de manera competente situaciones difíciles para la navegación (viajar en pequeños túneles, debajo de puentes y pasos elevados, trabajar a la sombra de edificios altos, etc.).Las desventajas incluyen una cierta inercia para determinar las coordenadas durante un cambio brusco de dirección con una velocidad bastante alta.