À propos de LightSail a déjà commenté Geektimes, un tel satellite geektimes.ru/post/250712 aété lancé avec succès la semaine dernière. La télémétrie a été effectuée avec succès pendant deux jours, tous les systèmes ont bien fonctionné, le déploiement de la voile a été prévu en juin, après 28 jours de vol, mais vendredi, le satellite a «disparu». Les ingénieurs ont passé un excellent week-end à essayer de comprendre ce qui s'est passé.Le résultat de leur travail est un article de Software Glitch Pauses LightSail Test Mission décrivant les événements qui ont conduit à l'échec et les étapes supplémentaires pour remettre le satellite en fonctionnement normal.La télémétrie est transmise à une fréquence de 437.435 MHz , la Planetary Society a exhorté les radio-amateurs à les aider à recevoir la télémétrie par satellite. Ken Swaggart (W7KKE) de Lincoln City, Oregon, est devenu le premier opérateur radio amateur à recevoir un package complet de télémétrie, l'événement s'est produit cinq heures après son lancement. En deux jours, 140 paquets de données ont été reçus - le satellite était en bon état, la puissance et la température étaient normales.Mais l'erreur était dans le logiciel satellite basé sur Linux. Toutes les 15 secondes, le satellite envoie un signal de balise. Dans le même temps, les données ont été ajoutées au fichier beacon.csv. Le moment approchait inexorablement lorsque le fichier occupait les 32 Mo d'espace mémoire disponible et que le logiciel de vol se plantait. Il s'avère que le fabricant de la carte de contrôle avait déjà une version logicielle avec une erreur corrigée, mais le satellite n'a pas été mis à jour vers la version actuelle. Vendredi, l'équipe de direction a reçu une notification d'erreur logicielle et se préparait à mettre à jour à distance le logiciel satellite la prochaine fois qu'il passerait dans le champ de vision de la station, mais le satellite a plané plus tôt. La dernière télémétrie a été reçue le 22 mai à 21 h 31 UTC. L'image montre la position du satellite lors de la dernière session de communication: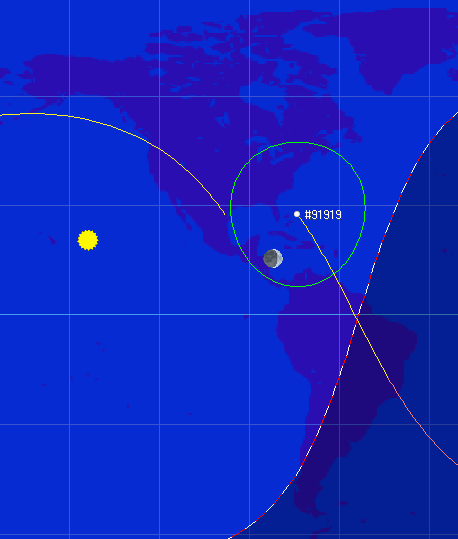
package complet de télémétriePacket 440500
Type: Telemetry Beacon
Mission: LS
Software: LS-FSW-v2
Hardware: LightSail Flight Unit A
Posted at: Wed May 20 18:32:41 2015 UTC
Human-readable form:
00: RTC =33315 [s]
01: UserTime =1373 [jiffies]
02: SystemTime =7761 [jiffies]
03: Processes =5966
04: Processes_Running =2
05: Processes_Blocked =0
06: Uplink_RX_Counter =0
07: Atmel_Volt =4.351990 [V]
08: Atmel_Curr =0.051117 [A]
09: DaughtAPwr_Volt =0.007996 [V]
10: DaughtAPwr_Curr =0.000000 [A]
11: DaughtATmp =15.500000 [C]
12: DaughtBPwr_Volt =0.007996 [V]
13: DaughtBPwr_Curr =-0.000900 [A]
14: DaughtBTmp =16.750000 [C]
15: FiveV_PlPwr_Volt =4.915985 [V]
16: FiveV_PlPwr_Curr =0.280914 [A]
17: ThreeV_PlPwr_Volt =3.279999 [V]
18: ThreeV_PlPwr_Curr =0.042725 [A]
19: SP1_Temp =22.500000 [C]
20: SP2_Temp =23.250000 [C]
21: SP3_Temp =24.000000 [C]
22: SP4_Temp =24.250000 [C]
23: SP5_Temp =0.000000 [C]
24: Power0_In =0.000250 [A]
25: Power1_Out =0.000250 [A]
26: Power2_In =0.000250 [A]
27: Power3_Out =0.000250 [A]
28: Power4_In =0.000250 [A]
29: Power5_Out =0.000250 [A]
30: Power6_In =0.000250 [A]
31: Power7_Out =0.000250 [A]
32: Power8 =0.664750 [A]
33: Batt0_Voltage =4.309040 [V]
34: Batt0_Current =79.375003 [mA]
35: Batt1_Voltage =4.313920 [V]
36: Batt1_Current =62.500002 [mA]
37: Batt2_Voltage =4.309040 [V]
38: Batt2_Current =97.656253 [mA]
39: Batt3_Voltage =4.299280 [V]
40: Batt3_Current =109.531254 [mA]
41: Batt4_Voltage =3.747840 [V]
42: Batt4_Current =10.156250 [mA]
43: Batt5_Voltage =4.313920 [V]
44: Batt5_Current =104.218753 [mA]
45: Batt6_Voltage =4.318800 [V]
46: Batt6_Current =106.562503 [mA]
47: Batt7_Voltage =4.313920 [V]
48: Batt7_Current =100.781253 [mA]
49: Gyro_Sens_1 =-7.062500 [deg/s]
50: Gyro_Sens_2 =-0.100000 [deg/s]
51: Gyro_Sens_3 =0.137500 [deg/s]
52: Sun_Sens1_X =150.300003 [deg]
53: Sun_Sens1_Y =131.399994 [deg]
54: Sun_Sens2_X =126.000000 [deg]
55: Sun_Sens2_Y =63.900002 [deg]
56: Sun_Sens3_X =58.500000 [deg]
57: Sun_Sens3_Y =80.099998 [deg]
58: Sun_Sens4_X =80.099998 [deg]
59: Sun_Sens4_Y =150.300003 [deg]
60: Sun_Sens5_X =180.000000 [deg]
61: Sun_Sens5_Y =180.000000 [deg]
62: Mag_Sens1_X =99 [mG]
63: Mag_Sens1_Y =382 [mG]
64: Mag_Sens1_Z =47 [mG]
65: Mag_Sens2_X =190 [mG]
66: Mag_Sens2_Y =149 [mG]
67: Mag_Sens2_Z =189 [mG]
68: Mag_Sens3_X =128 [mG]
69: Mag_Sens3_Y =259 [mG]
70: Mag_Sens3_Z =256 [mG]
71: Mag_Sens4_X =119 [mG]
72: Mag_Sens4_Y =18 [mG]
73: Mag_Sens4_Z =156 [mG]
74: Torque_Curr_X =0 [A]
75: Torque_Curr_Y =0 [A]
76: Torque_Curr_Z =0 [A]
77: Panel_Switch_Status =f
78: Motor_Current_Position =0 [Counts]
79: Camera_0_onOff =0
80: Camera_1_onOff =0
81: Sail_stowedDeployed =0
82: Motor_onOff =0
83: Camera_0_Remaining_Pics=0
84: Camera_1_Remaining_Pics=0
85: Bang_onOff =1
86: Sail_Damping_Executed =0
87: Pib_Met =4.000000 [s]