Bonjour à tous! Aujourd'hui, nous avons décidé de tester plusieurs appareils sur les plates-formes Qualcomm et MTK afin de comprendre si les gars de MTK ont complété leurs capacités de navigation, car il y a quelques années, ils ont travaillé, pour ne pas dire très bien, mais les solutions de Qualcomm ont toujours été célèbres pour leurs capacités. Les héros de notre premier test étaient deux smartphones, dont l'un est basé sur la plate - forme Qualcomm Snapdragon 400 et le second sur le tout nouveau MTK MT6735 , qui prend en charge 3 systèmes de navigation à la fois: GPS, GLONASS et Beidou. Les tests ont été effectués en mode piéton et lors de déplacements en véhicule. NMEA Tools Pro a été utilisé pour enregistrer les journaux NMEA.
Les héros de notre premier test étaient deux smartphones, dont l'un est basé sur la plate - forme Qualcomm Snapdragon 400 et le second sur le tout nouveau MTK MT6735 , qui prend en charge 3 systèmes de navigation à la fois: GPS, GLONASS et Beidou. Les tests ont été effectués en mode piéton et lors de déplacements en véhicule. NMEA Tools Pro a été utilisé pour enregistrer les journaux NMEA.Contrôle des piétons
Si vous regardez le fragment du journal NMEA ci-dessous, vous pouvez voir que pour calculer les coordonnées, les données de 9 satellites GPS (avec les numéros 07, 28, 30, 05, 20, 13, 19, 09 et 10) et 7 satellites GLONASS ( avec les numéros 77, 67, 76, 78, 86, 68 et 87).$GNRMC,080351.000,A,5546.3288,N,03732.4328,E,1.984,228.75,180515,,,A*42
$GNVTG,228.75,T,,M,1.984,N,3.676,K,A*29
$GNGGA,080352.000,5546.3281,N,03732.4320,E,1,16,0.74,117.8,M,14.5,M,,*7F
$GPGSA,A,3,07,28,30,05,20,13,19,09,10,,,,1.06,0.74,0.76*0C
$GLGSA,A,3,77,67,76,78,86,68,87,,,,,,1.06,0.74,0.76*1B
Les coordonnées sont calculées en fonction des données des deux systèmes de navigation, comme en témoigne le préfixe GN dans les lignes $ GNRMC, $ GNVTG et $ GNGGA.La piste enregistrée en mode piéton est représentée sur la figure: Sur la piste ci-dessus, la précision de positionnement peut être considérée comme tout à fait acceptable en mode piéton - pour une situation où le récepteur est entouré de gratte-ciel, recouvert de feuillage d'arbres et l'enregistrement est effectué par temps de pluie.
Sur la piste ci-dessus, la précision de positionnement peut être considérée comme tout à fait acceptable en mode piéton - pour une situation où le récepteur est entouré de gratte-ciel, recouvert de feuillage d'arbres et l'enregistrement est effectué par temps de pluie. Sur l'autre piste ci-dessous, vous pouvez voir le fonctionnement presque parfait du module de navigation du smartphone sur le MTK (piste bleue) par rapport au travail du module smartphone sur Qualcomm (piste rouge).
Sur l'autre piste ci-dessous, vous pouvez voir le fonctionnement presque parfait du module de navigation du smartphone sur le MTK (piste bleue) par rapport au travail du module smartphone sur Qualcomm (piste rouge). Le Qualcomm Snapdragon 400 SoC MSM8228 a également la capacité de fonctionner avec les systèmes satellites GLONASS et GPS. Cependant, à en juger par les journaux NMEA de cet appareil, les données des satellites GLONASS ne sont pas utilisées pour déterminer les coordonnées.En comparant les journaux NMEA enregistrés par les appareils au cours de ce test, vous pouvez voir que les signaux des mêmes satellites sont reçus par des appareils avec différents SNR (rapport signal / bruit) en même temps. Les SNR MTK dépassent en moyenne de plus de 10 dB les SNR de Qualcomm.Fragment du journal NMEA du périphérique MTK:
Le Qualcomm Snapdragon 400 SoC MSM8228 a également la capacité de fonctionner avec les systèmes satellites GLONASS et GPS. Cependant, à en juger par les journaux NMEA de cet appareil, les données des satellites GLONASS ne sont pas utilisées pour déterminer les coordonnées.En comparant les journaux NMEA enregistrés par les appareils au cours de ce test, vous pouvez voir que les signaux des mêmes satellites sont reçus par des appareils avec différents SNR (rapport signal / bruit) en même temps. Les SNR MTK dépassent en moyenne de plus de 10 dB les SNR de Qualcomm.Fragment du journal NMEA du périphérique MTK:$GNGGA,080418.000,5546.3160,N,03732.4086,E,1,17,0.66,111.0,M,14.5,M,,*79
$GPGSA,A,3,07,28,30,05,20,13,19,09,10,15,,,0.95,0.66,0.69*0E
$GLGSA,A,3,77,67,76,78,86,68,87,,,,,,0.95,0.66,0.69*1D
$GPGSV,3,1,12,30,86,107,32.6,07,52,084,31.1,28,45,188,22.1,13,40,297,30.2*7B
$GPGSV,3,2,12,05,37,257,37.9,20,34,266,34.3,19,26,066,18.2,27,18,035,*67
$GPGSV,3,3,12,09,11,138,39.3,10,10,197,34.8,15,09,308,17.0,21,06,337,*6C
$GLGSV,3,1,10,77,81,339,19.3,68,50,303,29.8,67,47,209,24.0,78,32,253,27.0*65
$GLGSV,3,2,10,76,31,060,15.0,86,25,066,19.0,85,18,012,,69,08,338,*6D
Extrait NMEA de l'appareil Qualcomm:$GPGGA,080418,5546.310615,N,03732.389129,E,2,09,1.5,157.0,M,15.0,M,,*41
$GPGSV,3,1,10,05,35,255,19,07,50,082,19,09,10,136,19,10,08,196,22*70
$GPGSV,3,2,10,13,39,296,14,19,24,064,13,20,32,265,13,28,45,187,15*76
$GPGSV,3,3,10,30,84,106,21*43
$GLGSV,1,1,10,67,46,208,14*58
| | Numéro satellite | trente | 07 | 28 | treize | 05 | dix | 67 |
| MTK | SNR, dB | 32,6 | 31,1 | 22.1 | 30,2 | 37,9 | 34,8 | 24,0 |
| Qualcomm | SNR, dB | 21 | dix-neuf | quinze | 14 | dix-neuf | 22 | 14 |
* Valeurs SNR audacieuses pour les satellites GLONASS.Étant donné que l'environnement de bruit électromagnétique externe est le même pour les deux appareils, cela signifie que la puissance du signal à l'entrée de l'appareil de navigation MTK est au moins 10 fois plus élevée. Et cela s'applique à la fois aux signaux du système satellite GPS et du système GLONASS. Il est difficile de dire quelle est exactement la cause de ce phénomène. On peut supposer, par exemple, que l'antenne GPS / GLONASS et le trajet de réception de l'appareil MTK sont plus solides et ont de meilleures caractéristiques que les modules d'appareils Qualcomm similaires. Cependant, ce n'est qu'une hypothèse.Le prochain essai pour piétons a également montré en moyenne un fonctionnement plus précis et plus stable du «récepteur de navigation» du dispositif MTK (piste bleue) par rapport au dispositif Qualcomm (piste rouge), bien que la piste elle-même ne semble plus aussi parfaite que la dernière fois. Lors de ce test, comme dans le précédent, les signaux des mêmes satellites ont été reçus par des appareils avec différents SNR en même temps. Comme dans le premier cas, le niveau des signaux satellites à l'entrée de l'appareil MTK est presque toujours plus élevé qu'à l'entrée de l'appareil chez Qualcomm. Les données sont présentées dans les fragments de journaux NMEA ci-dessous et sont tabulées pour plus de commodité.Fragment de journal Qualcomm NMEA:
Lors de ce test, comme dans le précédent, les signaux des mêmes satellites ont été reçus par des appareils avec différents SNR en même temps. Comme dans le premier cas, le niveau des signaux satellites à l'entrée de l'appareil MTK est presque toujours plus élevé qu'à l'entrée de l'appareil chez Qualcomm. Les données sont présentées dans les fragments de journaux NMEA ci-dessous et sont tabulées pour plus de commodité.Fragment de journal Qualcomm NMEA:$GPGSV,3,1,15,05,25,240,11,07,35,090,18,11,01,094,15,13,54,289,22*72
$GPGSV,3,2,15,15,21,306,25,19,24,047,12,20,24,253,11,27,08,022,16*7D
$GPGSV,3,3,15,28,61,182,10,30,68,091,25*78
$GLGSV,2,1,15,81,25,092,12,70,52,272,16,79,63,049,19,87,08,358,16*64
$GLGSV,2,2,15,71,23,331,18*5E
Fragment du journal NMEA du périphérique MTK:$GPGSV,3,1,11,30,70,092,35.4,28,62,184,16.5,13,56,290,28.7,07,36,091,27.1*7E
$GPGSV,3,2,11,05,26,241,24.8,20,26,253,18.9,19,25,049,15.9,15,23,307,24.9*73
$GPGSV,3,3,11,27,09,024,29.1,11,03,094,19.9,21,01,325,*40
$GLGSV,3,1,10,79,63,050,29.5,70,52,273,25.5,80,48,267,18.1,88,30,045,27.9*63
$GLGSV,3,2,10,69,27,202,13.7,81,26,093,23.1,71,24,332,28.6,78,16,069,*7A
$GLGSV,3,3,10,87,09,359,13.0,73,01,257,*74
| | Numéro satellite | 05 | 07 | Onze | treize | quinze | dix-neuf | vingt | 81 | 70 |
| MTK | SNR, dB | 24,8 | 27.1 | 19,9 | 30,2 | 24,9 | 15,9 | 18,9 | 23,1 | 25,5 |
| Qualcomm | SNR, dB | Onze | dix-huit | quinze | 14 | 25 | 12 | Onze | 12 | seize |
* Valeurs SNR audacieuses pour les satellites GLONASS.On peut également noter que le «récepteur de navigation» du smartphone sur le MTK commence à afficher l'emplacement exact beaucoup plus rapidement (à ne pas confondre avec le paramètre TTFF - Time To First Fix) après avoir commencé à enregistrer le journal (lorsque la position est fixe et que la vitesse de déplacement par rapport à la surface de la Terre est nulle). Dans le test ci-dessus, il a fallu 32 secondes, tandis qu'un smartphone Qualcomm a passé 59 secondes.Un bref résumé des résultats des tests sur les piétons du récepteur MTK.Le récepteur de navigation de l'appareil résout le problème en utilisant les informations des deux systèmes de navigation (GPS et GLONASS), ce qui permet de sélectionner les satellites avec les meilleurs niveaux de signal et la meilleure position dans le ciel. En gros, le récepteur dispose de deux fois plus de sources d'informations pour résoudre un problème de navigation. Apparemment, le récepteur a une antenne GPS / GLONASS de haute qualité et un chemin à haute fréquence bien conçu, qui fournit un niveau de signal suffisamment élevé pour un traitement ultérieur.Les caractéristiques ci-dessus permettent au récepteur de déterminer rapidement et avec précision l'emplacement actuel, ainsi que d'un fonctionnement plus fiable dans des conditions défavorables pour la réception de signaux satellites.Essais de véhicules
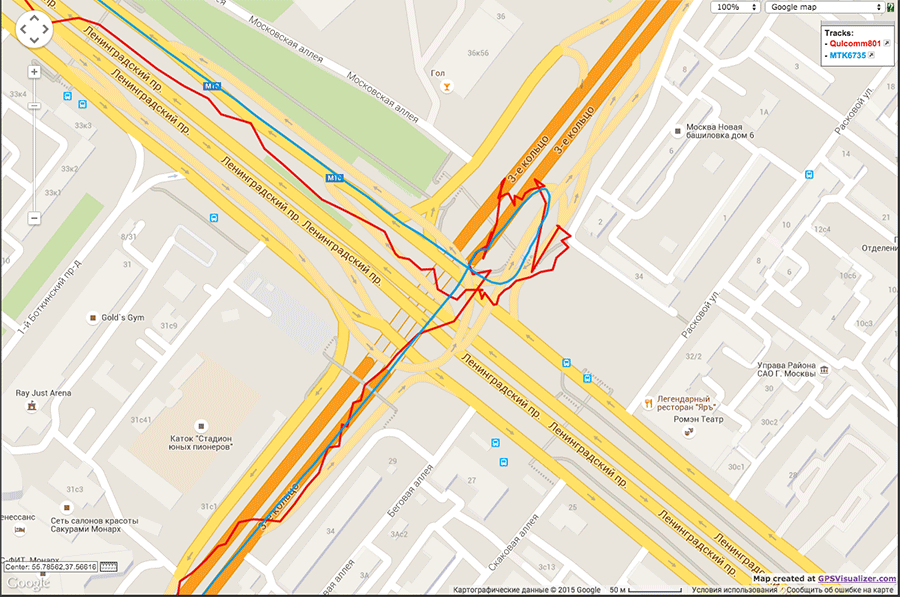
Les tests ont été effectués sur une moto. Cette fois, le rival du smartphone sur MT6735 était un smartphone basé sur Qualcomm Snapdragon 801 . Lors de l'enregistrement des journaux NMEA, les appareils se trouvaient dans les poches de poitrine de la veste du conducteur.Vous trouverez ci-dessous des extraits de pistes des deux appareils. La piste bleue est MT6735, la piste rouge est Qualcomm. Vous pouvez immédiatement noter une piste MTK beaucoup plus douce et peu dispersée. La piste de l'appareil Qualcomm reflète une dispersion assez importante dans la détermination des coordonnées sur presque tout le parcours. À partir des sauts chaotiques de la piste au début de l'itinéraire, vous pouvez voir combien de temps cet appareil a pris pour déterminer l'emplacement correct. Dans le même temps, le périphérique MTK a fait face à cette tâche beaucoup plus rapidement.Vous trouverez ci-dessous des fragments de pistes qui montrent à quel point le «récepteur de navigation» du MTK fonctionne avec plus de précision.
Vous pouvez immédiatement noter une piste MTK beaucoup plus douce et peu dispersée. La piste de l'appareil Qualcomm reflète une dispersion assez importante dans la détermination des coordonnées sur presque tout le parcours. À partir des sauts chaotiques de la piste au début de l'itinéraire, vous pouvez voir combien de temps cet appareil a pris pour déterminer l'emplacement correct. Dans le même temps, le périphérique MTK a fait face à cette tâche beaucoup plus rapidement.Vous trouverez ci-dessous des fragments de pistes qui montrent à quel point le «récepteur de navigation» du MTK fonctionne avec plus de précision.
 Il est tout à fait possible (voire très probable) que cela soit dû à un algorithme spécial de filtrage des données dans le récepteur lui-même, qui consiste en ce que les coordonnées actuelles sont ajustées en tenant compte de l'incapacité d'un objet physique à changer instantanément la vitesse, la direction du mouvement et l'emplacement.L'inconvénient de cette approche est que la moyenne et l'analyse nécessitent l'accumulation d'une certaine quantité de données et d'un certain temps pour prendre une décision. Cela conduit à une inertie notable dans la détermination des coordonnées, qui s'exprime dans la déviation de la piste par rapport à l'itinéraire réel, lorsque l'itinéraire change de direction et que la vitesse de déplacement est assez élevée (virages serrés, virages, jonctions d'autoroutes).Les fragments de journaux NMEA ci-dessous montrent approximativement les mêmes niveaux de signal provenant des mêmes satellites (GPS et GLONASS) en même temps. Dans l'affirmative, le fonctionnement plus correct du récepteur MTK est très probablement déterminé par un algorithme plus compétent pour le traitement des informations provenant des satellites.Fragment du journal NMEA du périphérique MTK:
Il est tout à fait possible (voire très probable) que cela soit dû à un algorithme spécial de filtrage des données dans le récepteur lui-même, qui consiste en ce que les coordonnées actuelles sont ajustées en tenant compte de l'incapacité d'un objet physique à changer instantanément la vitesse, la direction du mouvement et l'emplacement.L'inconvénient de cette approche est que la moyenne et l'analyse nécessitent l'accumulation d'une certaine quantité de données et d'un certain temps pour prendre une décision. Cela conduit à une inertie notable dans la détermination des coordonnées, qui s'exprime dans la déviation de la piste par rapport à l'itinéraire réel, lorsque l'itinéraire change de direction et que la vitesse de déplacement est assez élevée (virages serrés, virages, jonctions d'autoroutes).Les fragments de journaux NMEA ci-dessous montrent approximativement les mêmes niveaux de signal provenant des mêmes satellites (GPS et GLONASS) en même temps. Dans l'affirmative, le fonctionnement plus correct du récepteur MTK est très probablement déterminé par un algorithme plus compétent pour le traitement des informations provenant des satellites.Fragment du journal NMEA du périphérique MTK:$GNRMC,193331.000,A,5548.6090,N,03730.3074,E,44.714,334.77,190515,,,A*71
$GNVTG,334.77,T,,M,44.714,N,82.854,K,A*26
$GNGGA,193332.000,5548.6194,N,03730.2986,E,1,20,0.59,156.6,M,14.6,M,,*76
$GPGSA,A,3,16,07,21,15,13,18,27,26,22,19,20,29,1.12,0.59,0.96*0F
$GLGSA,A,3,78,69,85,86,71,77,87,70,,,,,1.12,0.59,0.96*12
$GPGSV,4,1,14,21,72,092,28.3,18,51,175,24.0,16,46,264,34.7,27,38,298,32.7*7B
$GPGSV,4,2,14,26,35,226,24.7,15,26,090,28.0,22,21,201,17.3,13,21,053,30.7*7A
$GPGSV,4,3,14,29,15,130,23.5,07,10,338,26.2,20,09,046,29.0,19,08,301,15.4*7A
$GPGSV,4,4,14,30,04,006,26.6,05,03,041,*62
$GLGSV,3,1,10,86,82,017,26.7,70,54,064,26.8,71,46,156,24.4,85,35,109,26.9*65
$GLGSV,3,2,10,87,29,300,18.8,77,25,294,17.3,78,18,350,20.0,69,10,024,18.3*6E
$GLGSV,3,3,10,76,05,245,,72,04,186,*6D
Fragment de journal Qualcomm NMEA:$GPGGA,193332.8,5548.632178,N,03730.280528,E,1,12,0.6,175.7,M,15.0,M,,*5F
$GPVTG,334.6,T,334.6,M,42.6,N,78.8,K,A*24
$GPRMC,193332.8,A,5548.632178,N,03730.280528,E,42.6,334.6,190515,0.0,E,A*38
$GPGSA,A,3,07,13,15,16,18,20,21,22,26,27,29,30,1.2,0.6,1.0*31
$GNGSA,A,3,07,13,15,16,18,20,21,22,26,27,29,30,1.2,0.6,1.0*2F
$GNGSA,A,3,78,70,86,77,69,87,85,71,,,,,1.2,0.6,1.0*25
$GPGSV,4,1,15,07,08,336,32,08,,,22,13,20,052,27,15,24,088,17*4E
$GPGSV,4,2,15,16,45,262,27,18,50,174,27,20,08,046,22,21,71,091,22*70
$GPGSV,4,3,15,22,20,199,15,26,34,224,25,27,36,296,30,29,13,129,18*79
$GPGSV,4,4,15,30,03,004,22,05,01,039,,19,07,299,*4A
$GLGSV,3,1,10,78,18,348,27,70,53,063,25,86,81,018,25,77,24,293,21*6D
$GLGSV,3,2,10,69,09,023,17,87,28,299,27,85,33,108,15,71,46,154,24*64
$GLGSV,3,3,10,76,04,244,,72,03,185,*69
On peut de nouveau noter que bien que le récepteur de l'appareil sur le SoC Qualcomm Snapdragon 801 traite les informations provenant des satellites GLONASS, dans les phrases principales du journal NMEA ($ GPGGA, $ GPRMC, $ GPVTG) il fournit des informations basées sur le traitement du signal uniquement à partir du système GPS .L'appareil MTK fournit des valeurs basées sur un calcul des données provenant des deux systèmes de navigation. Que ce soit un avantage ou non, c'est vraiment difficile à dire.Une brève conclusion.En général, le fonctionnement du "récepteur de navigation" de l'appareil basé sur MTK MT6735 a laissé une impression positive. Le récepteur détermine rapidement et avec précision les coordonnées actuelles. La répartition des valeurs de coordonnées pendant la navigation est faible. Le récepteur répond avec compétence aux situations difficiles de navigation (déplacements dans de petits tunnels, sous les ponts et les viaducs, travaux à l'ombre de grands immeubles, etc.).Les inconvénients incluent une certaine inertie dans la détermination des coordonnées lors d'un changement brusque de direction à une vitesse assez élevée.